







常見問題
快速按鈕
資訊詳情
工業機器人選型指標
發布時間:
2020-09-25
訪問量:
1000
【概要描述】
如何選擇工業機器人?9大指標幫你確定選型。
選擇工業機器人主要從以下9個方面考慮:
1、應用環境
首先,需要確定的是機器人的應用環境以及應用制程。
- 如果應用制程需要人機協作,即在人工旁邊由機器人協同完成,半自動流程線,協作型機器人應該是較好的選擇。
- 如果是需要一個緊湊型的取放料機器人,可以選擇水平關節型機器人。
- 如果是尋找對小型物件,快速取放的方合,并聯機器人比較合適。
水平關節型機器人可以是適應一個非常大范圍的應用,從取、放料到碼垛,以及噴涂、焊接等專用制程,關節型機器均可以實現。在選擇工業機器人時,可以根據具體的應用環境選擇相適應的機器人型號。
2、有效負載
有效負載,即機器人在其工作空間內可以攜帶的最大負荷。基本負載從3KG到130KG不等。
如果你希望機器人完成將目標從一個工位搬運到另一個工位,需要注意將工件的重量以及機器人爪手的重量加總到其工作負荷。
另外特別需要注意的是機器人的負載曲線,在空間范圍的不同距離位置,實際負載能力會有差異。
3、自由度(軸數)
機器人配置的軸數直接關聯其自由度。如果是針對一個簡單的直來直去的場合,比如從一條皮帶取放到另一條,簡單的4軸機器人就足以應對。
但是,如果應用場景在一個狹小的工作空間,且機器人手臂需要很多的扭曲和轉動,6軸或7軸機器人將是最好的選擇。
軸數一般取決于應用場合。應當注意,在成本允許的前提下,選型多一點的軸數在靈活性方面不是問題。這樣方便后續重復利用改造機器人到另一個應用制程,能適用更多的工作任務,而不是發現軸數不夠。
4、最大活動范圍
當評估目標應用環境的時候,應該了解機器人需要到達的最大距離。選擇一個機器人不是僅僅憑它的有效負載,也需要綜合考量它到達的確切距離。機器人的水平運動范圍,注意機器人在近身及后方的一塊非工作區域。
5、重負精度
同樣的,這個因素也還是取決于你的應用場合。重復精度可以被描述為機器人完成例行工作任務每一次到達同一位置的能力。
一般在±0.05mm到±0.02mm之間,甚至更精密。例如,如果需要你的機器人組裝一個電子線路板,你可能需要一個超級精密重復精度的機器人。如果應用工序是比較粗糙,比如打包、碼垛等,工作機器人也就不需要那么精密了。
另外一方面,組裝工程的機器人精度的選型要求,也關聯組裝工程各環節尺寸和公差的傳遞和計算,比如:來料物料的定位精度,工件本身在治具中的重復定位精度等。這項指標從2D方面以±表示。事實上,由于機器人的運動重復點不是線性的而是在空間3D運動,該參數的實際情況可以是在公差半徑內的環形空間內任務位置。
當然,配合現在的機器視覺技術的運動補償,將減低機器人對于來料精度的要求和依賴,提升整體的組裝精度。
6、速度
這個參數與每一個用戶息息相關。事實上,它取決于在該作業需要完成的CYCLE TIME 。規格表列明了該型號機器人最大速度,但我們應該知道,考量從一個點到另一個點的加減速,實際運行的速度將在0和最大速度之間。這項參數單位通常以度/秒計。
7、本體重量
機器人本體重量是設計機器人單元時的一個重要因素。如果工業機器人必須安裝在一個定制的機臺,甚至導軌上,你可能需要知道它的重量來設計相應的支撐。
8、剎車和轉動慣量
機器人制造商通常會提供機器人制動系統的信息。有些機器人對所有軸配備剎車,其他的機器人型號不是所有軸都配置剎車。要在工作區中確保精確和可重復的位置,需要有足夠數量的剎車。另外一種特別情況,意外斷電發生的時候,不帶剎車的負重機器人軸不會鎖死,有造成意外的風險。
同時,有些機器人制造商也提供機器人的轉動慣量。其實,對于設計的安全性來說,這將是一個額外的保障。你可能還注意到不同軸上的使用扭矩。例如,如果你的動作需要一定量的扭矩以正確完成工作,你需要檢查,在該軸上使用最大扭矩是否正確的。如果選型不正確,機器人則可能由于過載來DOWN機。
9、防護等級
根據機器人的使用環境,選擇達到一定的防護等級(IP等級)的標準。
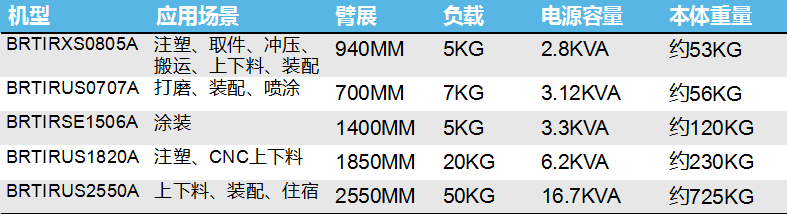
時代超群工業機器人熱銷機型參數如下:
關鍵詞:

公司擁有經驗豐富的銷售和技術服務團隊,可為用戶提供多層次產品選型配套服務及售后技術支持。公司始終致力于嚴格的質量控制和周到的客戶服務,經驗豐富的客服人員隨時對接需求,確保客戶充分滿意。公司核心產品包括1.5伺服電機、110步進電機、130步進電機、400W伺服電機、57步進電機、750W伺服電機、86步進電機、大功率伺服電機、步進驅動器、行星減速機、閉環步進電機等。
聯系方式
公司地址:北京市房山區良鄉鎮良官大街58號工業基地8號院
聯系電話:馬經理:15811233030
配套選型:沙工13716815968、刁工18612376855
工業機器人:安巖18010008226、安慧16710088966
河南商丘分部:李工17600500753 張工15210337990
河北棗強分部:李工17734080008 馮工18131814411

微信公眾號
掃一掃關注“時代超群”
版權所有:北京時代超群電器科技有限公司 京ICP備18020700號-2 網站建設:中企動力 北京 SEO標簽
公司核心產品包括1.5伺服電機、110步進電機、130步進電機、400W伺服電機、57步進電機、750W伺服電機、86步進電機、大功率伺服電機、步進驅動器、行星減速機、閉環步進電機等。